Blog
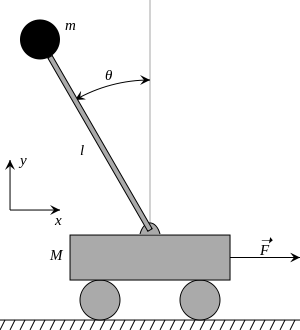
Fig. 1 - Inverted Pendulum
Inverted Pendulum Swing Up Model Predictive Control
Reinforcement learning has been applied with remarkable sucess in some classical control problems [1]. While this seems to indicate a good potential for more applications it is still important to look at these problems from a classic perspective to: first, have a strong understanding of how the field developed and, second, to have a broad palette of solutions.
One such problem is the so called Inverted Pendulum Swing-up problem. This problem's objective is to balance a pendulum in an upright position starting from a resting position, as can be seen in this demonstration video from the University of São Paulo:
Vid. 1 - Inverted Pendulum Swingup
In this article we will go over all the steps required to solve this problem with the Model Predictive Control (MPC) framework:
- Mathematically modelling the systems dynamics using the Lagrangian method.
- Problem formulation in an optimization setting, defining the cost function and constraints.
- Optimization solving the problem numerically.
1. Mthemtic Moe
Fig. 1 - Inverted Pendulum